6-Axis Collaborative Cobot for Factory Carton Loading & Stacking, Safe Robotic Arm
Product application scenario diagram



Product detail images


This intelligent collaborative robot is equipped with a six-joint torque sensor, delivering exceptional external force detection performance. It features higher detection accuracy, enhanced sensitivity, and outstanding stability, enabling safe human-robot collaboration, precise force control, and reliable operation in automated production, packaging, and material handling workflows.
This diagram details the precise workspace and dimensional parameters of the collaborative robot, including a maximum reach of 1418mm, vertical stroke of 1663mm, and compact base diameter of 190mm. It clearly illustrates the flange front end's motion range , enabling accurate verification of installation space, reach capability, and application compatibility for automated production lines.
Product Highlights
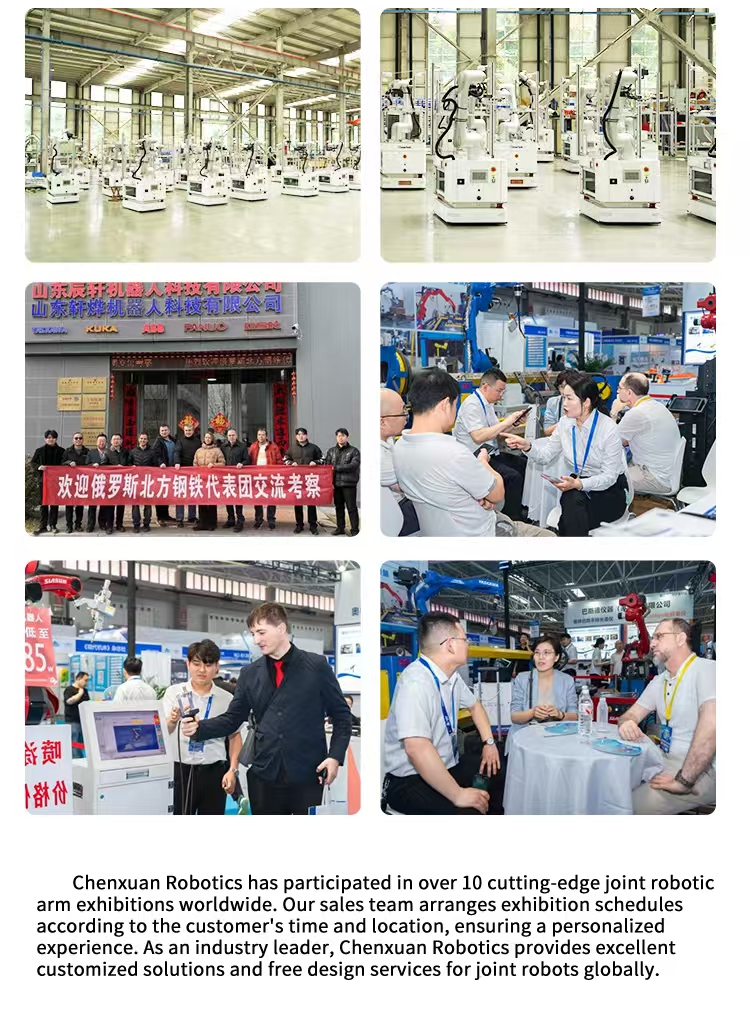
Company Introduction


Factory Situation